RCS AI 기반 디스패칭
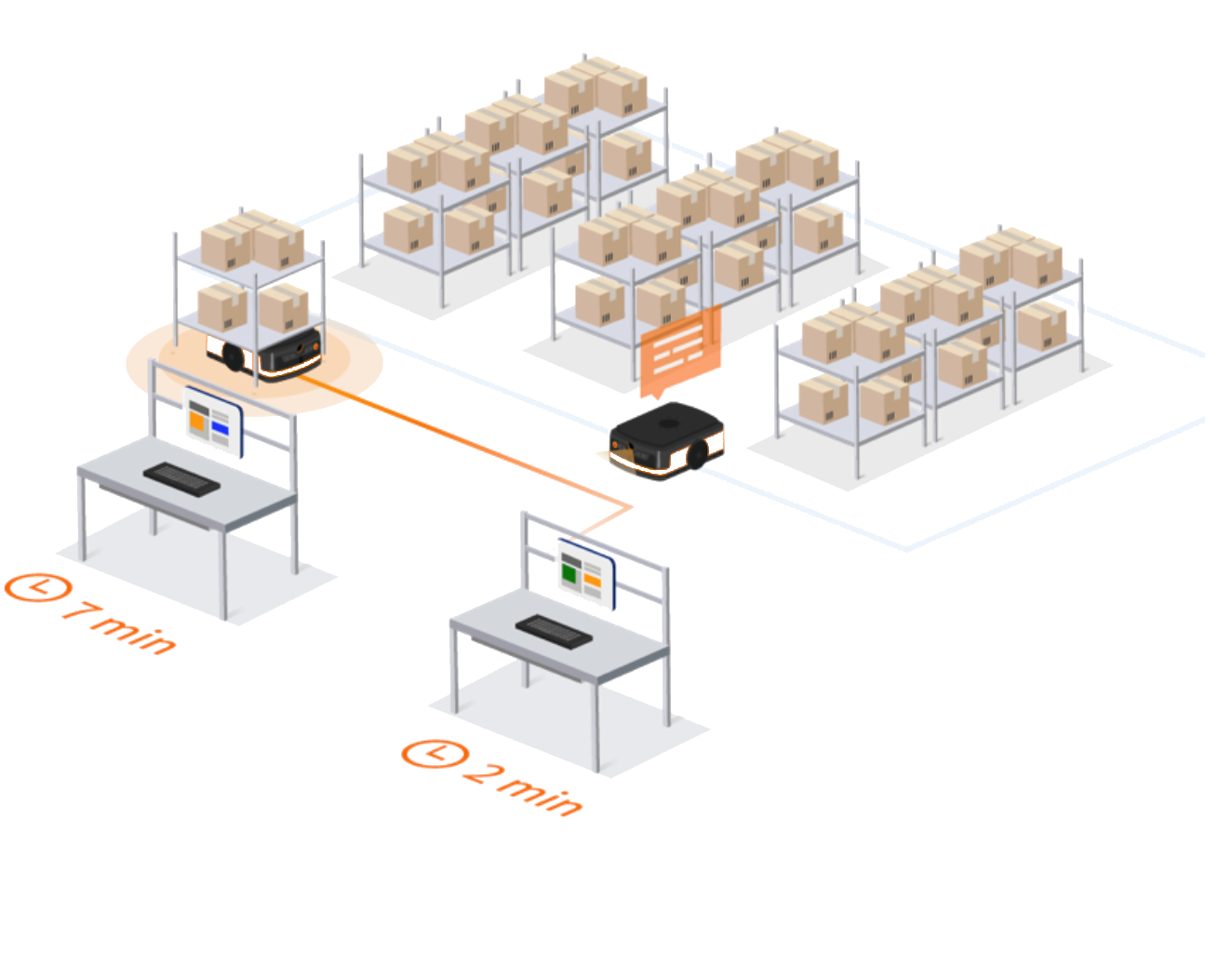
예측 데이터 마이닝을 통해 RCS가 작업 생성 피크 구간을 예측하고 유휴 이동 로봇을 대기 구역에 사전 배치하여 전체 물류 처리량을 극대화합니다.
이동 로봇, 컨베이어, 엘리베이터, 자동문, 기존 제어가 별도 시스템으로 움직이면 병목이 생깁니다.
RCS는 로봇 플릿, WMS/MES/ERP, PLC, 컨베이어, 엘리베이터, 자동문, 선택 장비를 하나의 실행 계층으로 연결합니다.
로봇 플릿, 현장 레이아웃, 주변 설비, 운영 규칙에 맞게 구성되는 RCS입니다.
가능한 곳에서는 DropletAI-first로 시작하고, 기존 시스템, 선택된 타사 장비, 현장 제약에는 개방형 인터페이스를 제공합니다.
AMR, AGV, 컨베이어, 분류기, AS/RS, 제어 시스템을 다중 벤더 호환 실행 계층과 하나의 운영 화면으로 조율합니다.
귀사의 작업 할당, 웨이브 계획, 우선순위 규칙은 범용 알고리즘이 아닌 귀사 운영에 맞게 구축됩니다.
전체 자동화 현장에 걸친 실시간 장비 상태, 처리량 지표, 병목 감지.
코드는 귀사 소유입니다. 확장하거나, 수정하거나, 통합하세요 — 변경을 위해 저희에 의존할 필요 없습니다.
하나의 제어 계층에서 로봇을 디스패치하고 교통을 관리하며 주변 설비를 동기화합니다.
AMR, AGV, 컨베이어, 분류기를 통합 제어하고 장비 유형 간 작업을 실시간으로 조율합니다.
예측 데이터 마이닝을 통해 RCS가 작업 생성 피크 구간을 예측하고 유휴 이동 로봇을 대기 구역에 사전 배치하여 전체 물류 처리량을 극대화합니다.
표준화되고 확장 가능한 인터페이스로 WMS, MES, ERP를 연결하고 PLC, 컨베이어, 엘리베이터, 자동문 및 주변 하드웨어를 조율합니다.
전체 자동화에 걸친 장비 상태, 처리량, 활용률에 대한 실시간 가시성.
RCS는 AI 기반 작업 타이밍, 로봇 스테이징, 확장형 인터페이스를 결합해 병목 형성 전에 실행이 반응하도록 합니다.
예측 데이터 마이닝을 통해 RCS가 작업 생성 피크 구간을 예측하고 유휴 이동 로봇을 대기 구역에 사전 배치하여 전체 물류 처리량을 극대화합니다.
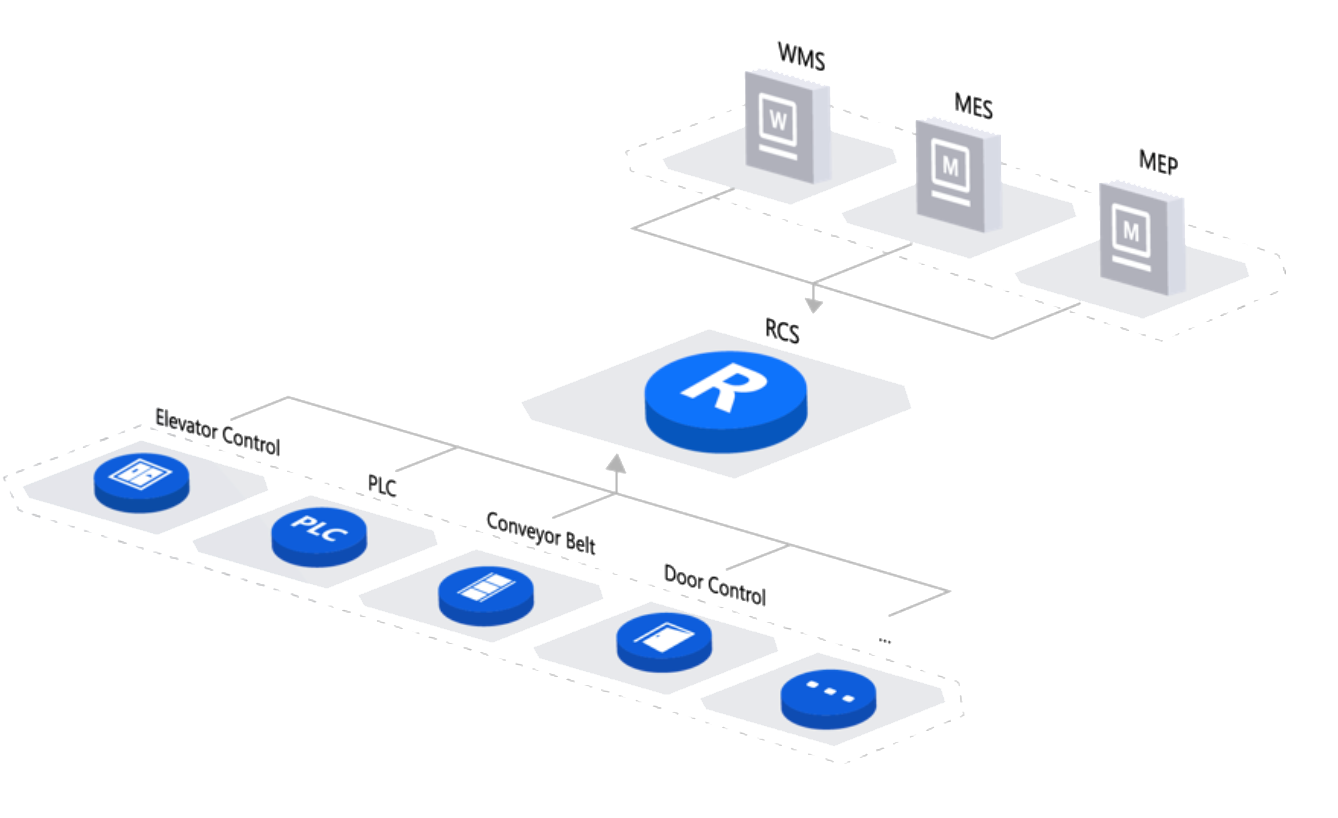
RCS는 확장 가능한 인터페이스로 WMS, MES, ERP와 연결되고 PLC, 컨베이어, 엘리베이터, 자동문 등 주변 장비를 동기화합니다.
각 RCS 배포는 로봇 플릿, 자동화 설비, 바닥 레이아웃, 운영 규칙에 맞게 구성됩니다.
혼합 설비가 운영 혼란으로 이어져서는 안 됩니다. 디스패칭, 제어, 실행 인터페이스를 통합하세요.
또는 이메일: hello@dropletai.services
30분 상담 · 사용 사례 확인 · 부담 없음