DropletAI AMR / AGV 제품
카트, 팔레트, 라인사이드, WIP, 중량물, 산업별 핸들링 로봇.
DropletAI는 자체 로봇과 소프트웨어를 우선 적용하고, 현장에 필요한 선택 시스템을 통합합니다.
로봇 제품, AI 소프트웨어, 시뮬레이션, 현장 실행을 실제 공장과 창고 물류 이동에 맞춰 구성합니다.
카트, 팔레트, 라인사이드, WIP, 중량물, 산업별 핸들링 로봇.
미션 디스패치, 교통 제어, 모니터링, 이용률, 예외, 운영 가시성.
MES, ERP, WMS, PLC, 버튼, 포토아이, 스캐너, 컨베이어, 엘리베이터, 도어 신호.
제품은 피킹, 이동, 분류, 보충, 라인사이드 실행과 연결될 때 평가하기 쉽습니다.
WMS/WES 로직 기반 goods-to-person, tote-to-person, shelf-to-person, 보관 배치, 보충.
카트, 팔레트, WIP, 전극 롤, 라인사이드, 장비 도킹, 생산 보충.
스캔, 계량, 분류, 스테이징, 후속 인계를 연결하는 물류 흐름.
각 제품군은 하중, 통로, 도킹, 캐리어, 교통 패턴, 서비스 모델에 맞춰집니다.

랙과 트롤리 아래로 진입해 자율적으로 결합하는 저상형 전방향 AMR로, 고밀도 유연 운반에 적합합니다.

생산라인 도킹, 지점 간 운반, 중대형 자재 이송을 위한 고하중 리프팅 로봇입니다.

배터리 코팅, 캘린더링, 슬리팅, 롤 버퍼, 공정 측 이송을 위한 특화 AMR 캐리어입니다.

라인사이드 랙, 차량 모듈, WIP 이동, 혼류 최종 조립 흐름을 위한 유연한 AMR 시스템입니다.
생산 물류부터 창고와 유통 실행까지 실제 산업 운영 중심으로 구성됩니다.

창고 네트워크의 보관 밀도, 토트/박스 이동, 보충, 입출고 효율을 높입니다.

싱귤레이션, 스캔, DWS, 분류, 라우팅, 집하를 결합해 고처리량 소포 운영을 지원합니다.

다양한 박스 자재, 라인사이드 보충, 유연한 WIP 흐름, 전 범위 자재 관리를 지원합니다.

라인사이드 공급, WIP 이동, 랙 이동, 배터리 자재 이송, 공정 물류를 자동화해 유연한 생산을 지원합니다.
카톤, 팔레트, 라인사이드 이송을 위한 자율주행 모바일 로봇.
CMR/HMR은 자체 개발 리프팅 모듈을 통합해 생산 및 인트라로지스틱스 환경에서 자동 도킹을 지원합니다.
적합한 적용 시나리오
설비-라인 도킹 · 라인사이드 자재 이송

CTU는 무인 피킹/핸들링 로봇으로, 여러 화물을 동시에 이송해 효율과 저장 용량을 높입니다.
적합한 적용 시나리오
고밀도 카톤 저장/출고 · 다품목 피킹 및 이송

FMR은 표준 빈/팔레트 자동 이송에 특화되어 있으며, 고정밀 내비게이션과 안정적인 핸들링을 제공합니다.
적합한 적용 시나리오
창고 통로 팔레트 이송 · 입출고 자동화

LMR은 래턴트 리프팅 메커니즘으로 동작 성능을 높이고 안전 보호를 강화해 비용 효율적인 생산성을 제공합니다.
적합한 적용 시나리오
랙/선반 래턴트 이송 · 라인사이드 보충

카운터밸런스 트럭 AGV/AMR은 실내외 자동 물류 이송, 상하차, 입출고 작업을 효율적으로 수행하도록 설계되었습니다.
적합한 적용 시나리오
실내외 팔레트 이송 · 도크 상하차 자동화

카운터밸런스 스태커 AGV/AMR은 자동화되고 유연한 물류 이송 및 입출고를 구현하며, 팔레트/보관 케이지 등 다양한 캐리어를 지원하고 WMS 연동이 가능합니다.
적합한 적용 시나리오
팔레트/케이지 입출고 자동화 · 혼합 캐리어 환경의 유연한 적재

리치 트럭 AGV/AMR은 기존 절차나 인프라 변경 없이 자동화되고 유연한 자재 이송 및 입출고를 구현해 물류 효율을 크게 높입니다.
적합한 적용 시나리오
고층 랙 팔레트 입출고 · 기존 창고 운영의 리트로핏 자동화

슬림 팔레트 무버 AGV/AMR은 1620 x 800 x 1830 mm의 컴팩트 설계를 적용했으며, 자중 520 kg에 최대 2000 kg 적재를 지원합니다.
적합한 적용 시나리오
협소 통로 팔레트 이송 · 비용 효율 중심의 창고 자동화 도입
특수 하중, 낮은 클리어런스, 정밀 도킹, 공정 요구에 맞춘 LC, 리프팅, 코팅, 최종 조립 로봇 라인입니다.
LMR-LC는 랙과 트롤리 아래로 진입해 부드러운 측면 이동, 전후진, 제자리 회전을 수행하는 저상형 전방향 로봇입니다.
적합한 적용 시나리오
고밀도 랙 및 트롤리 이동 · 유연한 저상 운반
중량물 리프팅 AMR은 생산라인, 지그, 대형 캐리어와 도킹해 지점 간 운반과 라인사이드 배송을 수행합니다.
적합한 적용 시나리오
대형 자재 운반 · 라인사이드 배송 및 도킹
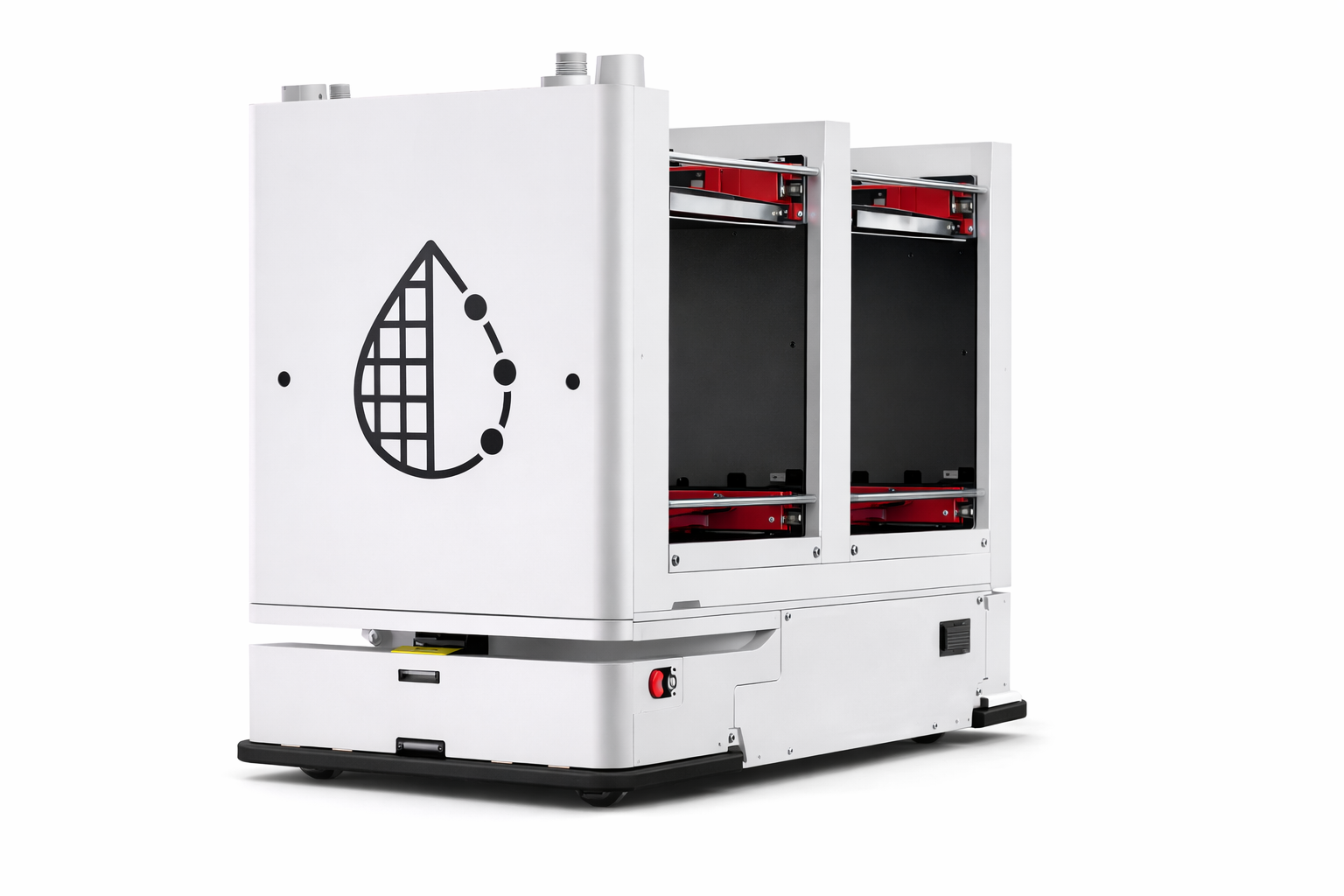
코팅 롤 핸들링 AMR은 리튬 배터리 제조의 전극 롤 로딩, 언로딩, 버퍼, 설비 도킹 요구를 해결합니다.
적합한 적용 시나리오
전극 롤 이송 · 코팅 및 슬리팅 공정 물류
자동차 최종 조립 AMR은 유연한 혼류 생산, 차체 구조 이송, 트롤리 동행 조립, 경로 변경을 지원합니다.
적합한 적용 시나리오
자동차 차체 핸들링 · 유연한 최종 조립 물류
소포 흐름 자동화를 위한 분류, 스캔, 싱귤레이션 시스템.
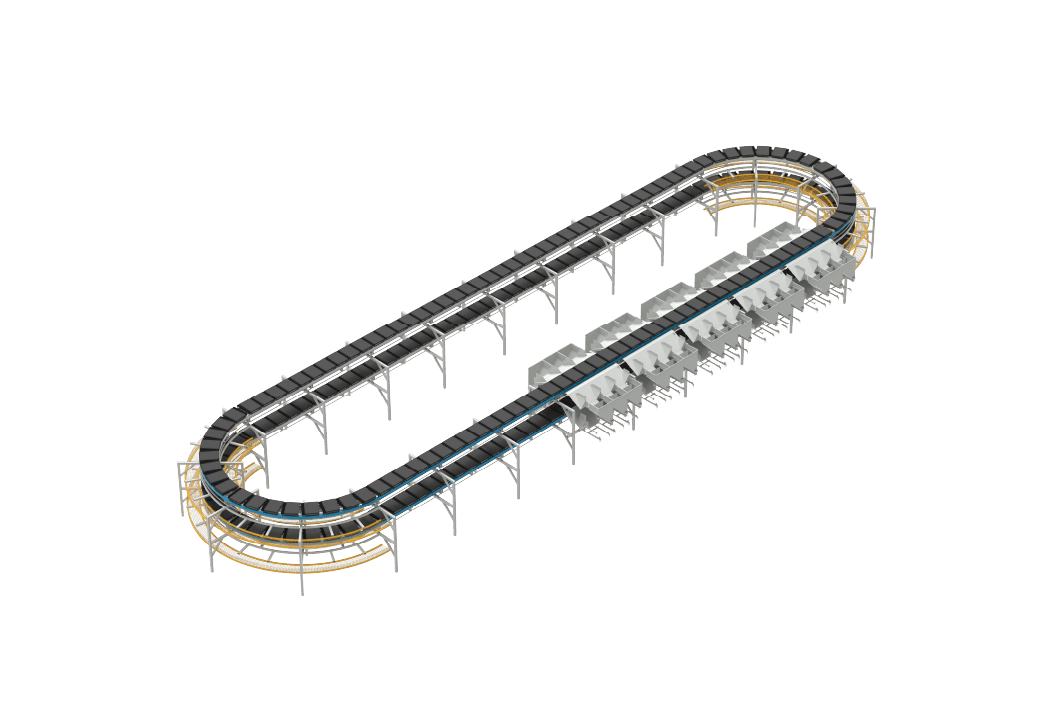
크로스벨트 소터는 연속 고효율 분류를 제공하며, 내로우벨트 소터는 사이트 규모에 맞춰 모듈을 증감할 수 있습니다.
적합한 적용 시나리오
택배 간선 분류센터 · 이커머스 물류 허브
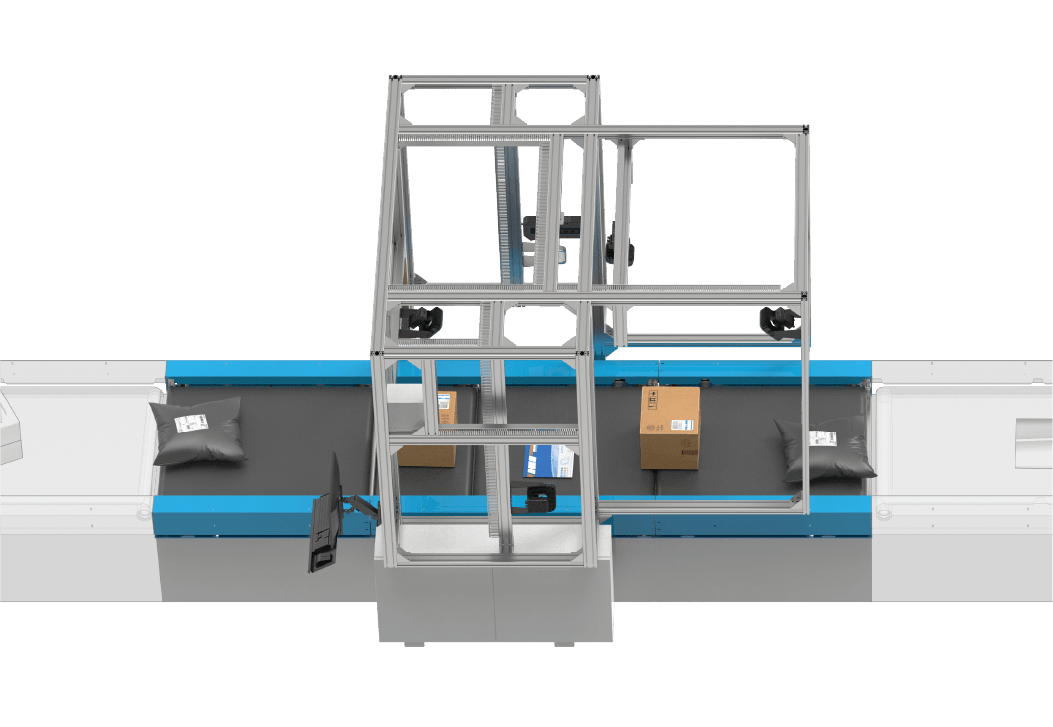
DWS는 치수 측정, 계량, 바코드 스캔을 결합해 6면 코드, 체적, 중량을 한 흐름에서 수집합니다.
적합한 적용 시나리오
하차 및 해체 구역 · 이상 소포 처리 구역
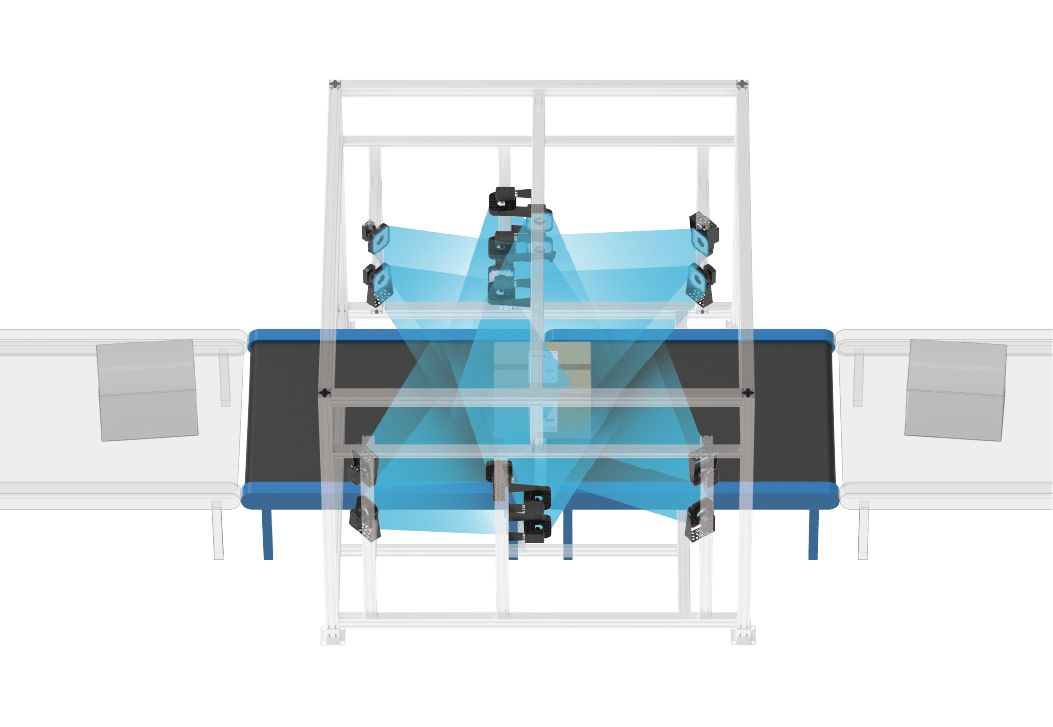
해당 터널은 20MP 에어리스캔 카메라와 8K 라인스캔 카메라로 소포 6면 바코드를 동적으로 고속 취득합니다.
적합한 적용 시나리오
대규모 분류 시나리오 · 허브 스캔 라인
3D 벌크 플로우 싱귤레이터는 지능형 카메라와 제어를 활용해 적치 소포를 분리하고 안정적인 투입을 유지합니다.
적합한 적용 시나리오
자동 분류 시스템 전단 · 고유량 인덕션 라인
라인사이드, WIP, 보충, 팔레트, 카트, 공장-창고 흐름을 공유하면 로봇, 소프트웨어, 통합, 현장 실행을 매핑합니다.
또는 이메일: hello@dropletai.services